The WOLFPACK!
We are team 19916 of the FIRST® Tech Challenge North East Florida League, known as The WOLFPACK!. We are based in Jacksonville, Florida, of Duval County, as the robotics team of Samuel W. Wolfson High School. Every year, we gather returning and new members to design, build, and test a robot created for the express purpose of competing in the seasonal FTC season. Our robot is created each season from the efforts of our team members and our club leaders, who dedicate their time and skill to help assemble and program the robot to full usability, and compete in the FTC tournaments.
Robotics Team of Samuel W. Wolfson High School
As a robotics team of an advanced studies high school, we aim to promote STEM to our school and our county district of Duval. We want to represent Wolfson's capabilities in the STEM field and demonstrate the knowledge and skills the school has promoted in us during our academic endeavors. We are proud to be part of the PACK!
Quick Links
FTC Into The Deep
- The Robot was developed overtime throughout the 2024-2025 FTC season,
Into the Deep. It went through many different changes and iterations, but towards
the end of the Northeast Florida meets, we finalized the following changes to the
robot:
- Claw: Located on the vertical slide, the claw was made for grabbing samples and specimens from the observation zone and placing them in the baskets and submersible bars. Thanks to its reach, we are able to reach both the high basket and high bar.
- Lift and hanging mechanism: Our lift uses a belt drive system in order to reach the high basket and the high bar. In addition, we have a Home Depot garage hook on the bottom of the vertical slide shaft repurposed to support the robot on the high bar.
- Roller intake: Located at the back of the robot, the roller intake uses a horizontal slide to extend in to the submersible, and a 2 rollers to squeeze the samples into place. The roller mechanism is 3D printed and an arm allows it to rotated up from the ground.
- Autonomous: Programmed in Java, our autonomous consists of a combination of preset instructions and autocorrection features. The robot is capable of putting four samples in the high basket during autonomous.

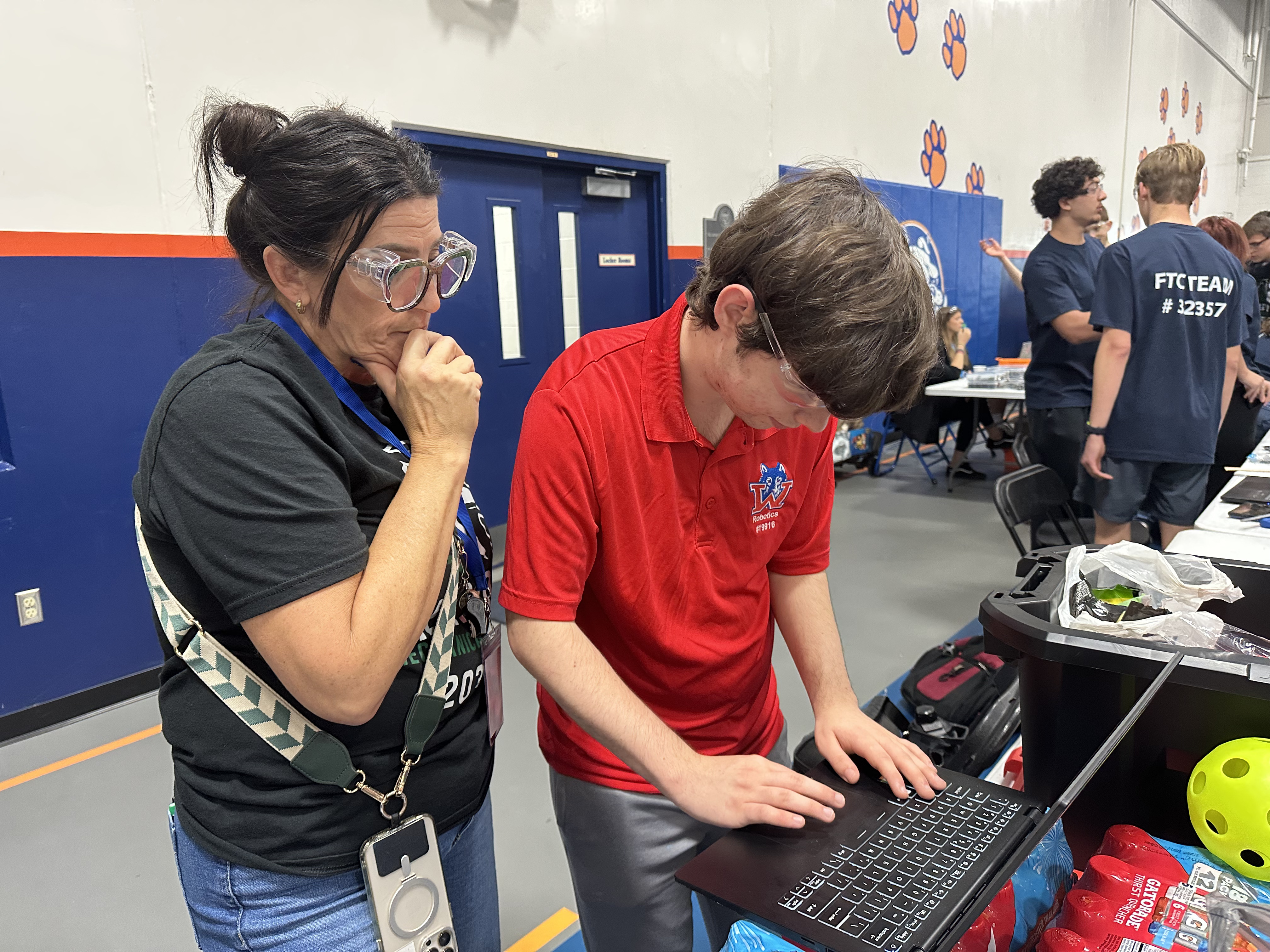
Club in Action
Interested? Contact Us
wolfsonrobotics@gmail.com piccad@duvalschools.org wrightr7@duvalschools.orgSocials